Wednesday, January 18, 2006
V2 WHERE ARE YOU..?
Robosapien V2
Well its been a while since I wrote anything about the V2 so I thought what better way to start then to talk about possible interfacing with other robots and devices.
roschler sparked some idea`s after a late night email trail, and the resault is a more complete picture of how I plan to work with the v2 and other robots.
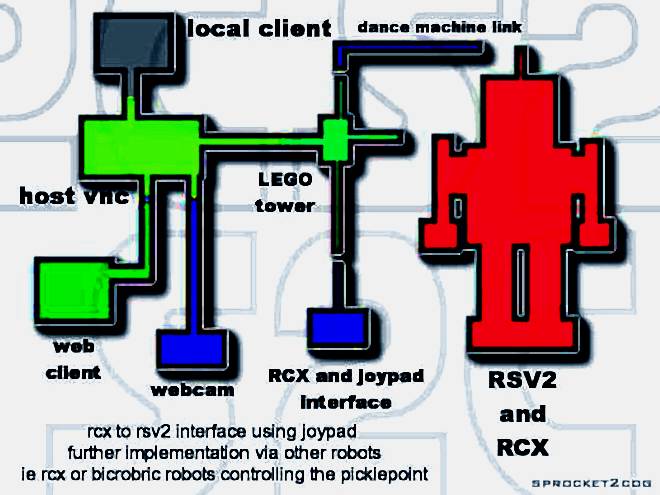
As you can see the idea in the diagram is to link the v2 to the main server which most likely will run a password protected vnc service. The client`s then could be situated lacally on a LAN or WLAN and net acsess would also be possiable but how functional it will be remains to be seen.
The V2 has many ways that the host computer could control it including directly stimultating the controller with another robot or program-hardware interface like the RCX or NXT (soon..) the VIPER from microbric , and a serial or parallal port interface board.
The V2 could be fitted with LED`s or a slave sensor unit (rcx) to and send back to the host, any feedback needed to control the bot.
A remote user for example with a webcam enabled to see the bot, could see visual cues like diffrent lights to show diffrent things like, "i am talking." further projects would injvolve removing the pomputer interface and having anothe robot controlling the v2`s actions by triggering the remote, or even sending the signals straight from it1s own IR transmitter, (viper has hardware modulation for IR) so the v2 could chase it around the room and react if it touch`s it or such.
On a slighly diffrent note,If your bored and need afriend, the sapienCHAT v2 has surfaced on pandorabots.com go to sapienCHAT (flash or html) thanks roschler for hosting the flash files on
your server.
![]()